
Thomas Hocker, Frank Hocker
2000
Das Projekt wurde bei Jugend forscht (Schüler experimentieren) in Frankfurt/Oder im Jahr 2000 vorgestellt und erreichte eine Auszeichnung.
| Robotermodell | |
|
|
|
| Forscher: Thomas Hocker, Frank Hocker |
Vorstellungsjahr: 2000 |
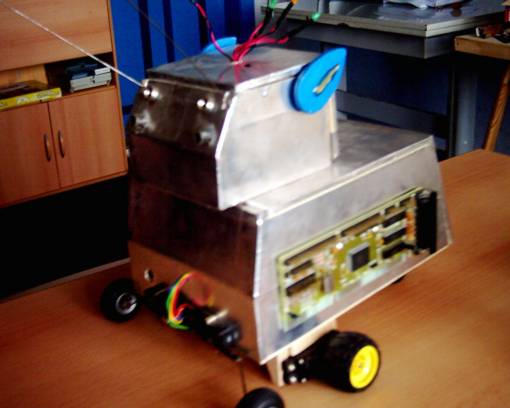
| Bei dem Roboter handelt es sich um die Konstruktion, Bau und Erprobung eines einfachen kybernetischen Modells unter Verwendung von Bausätzen und Bauteilen aus der Elektronik und des Modellbaus. Das Modell ist selbstfahrend und selbstlenkend. Es reagiert auf Schall, Licht und Berührung. | |
|
Das Projekt wurde bei Jugend forscht (Schüler experimentieren) in Frankfurt/Oder im Jahr 2000 vorgestellt und erreichte eine Auszeichnung. |
|